|
丟步檢測 Check Lost Step, 運用判斷機械臂認為的位置和通過感測器實際得到的位置中, 各個角度差是否達到了 5°(可任意修改)。 吾可通過設置丟步角度,當執行的點位丟步角度大於設置值時,機械臂判斷為丟步。 Dobot Studio 中共有三個模組含有丟步檢測 Check Lost Step 的功能:示教再現、Blockly 和腳本控制。 1、 示教再現——Check Lost Step 在示教再現高級功能(Pro)模組右側功能表列中,有一個 Check Lost Step 的功能,可用 於檢測在執行存點過程中是否有丟步, 保存點位元,設置一個或多個 CLS 的狀態為“On”。在執行點位過程中,若機械臂碰到物體 導致丟步,當其執行到丟掉的那一步時,機械臂會自動暫停,並通過“亮紅燈” 做為警示。  2、 Blockly——丟步檢測 在 Blockly 左側功能表列中,DobotAPI – 配置 和 運動 中有 設置丟步參數 和 丟步檢測的模組, 右下角為相對應的通用代碼,可用於執行過程中判斷機械臂是否丟步。  3、 腳本控制——LostStep 在腳本控制左側功能表列 LostStep 中有兩條關於丟步檢測的指令: dType.SetLostStepParams (api , threshold) 和 dType.SetLostStepCmd(api , isQueued=0) ,可用 於執行過程中判斷機械臂是否丟步。 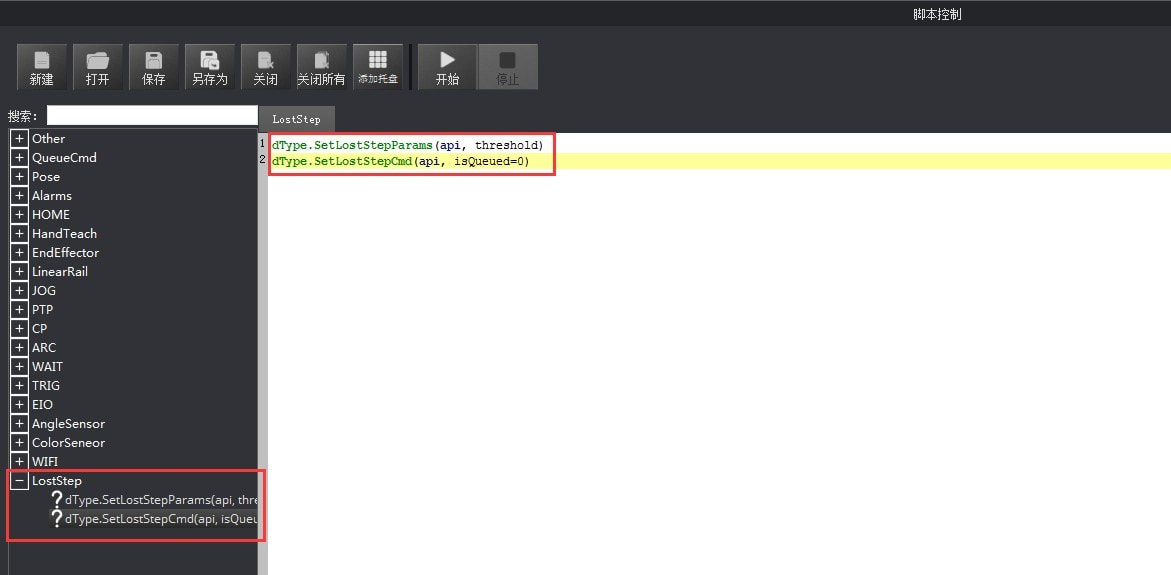 那麼,要如何讓機械臂恢復正常工作呢?
很簡單!先歸零,再重新開始,機械臂就可以恢復正常工作了。 發表回覆。 |
本頁目的提供您技術人員在使用操作上的記錄及建議 文章
五月 2020
類別 |
 RSS 訂閱
RSS 訂閱
